Sandzwerg hatte einen defekten Dell XPS Computer mitgebracht. Ein ziemlich abgefahrenes Teil – eine Mischung aus Notebook und Desktopcomputer. Der Besitzer wollte ihn reparieren lassen, doch der Hersteller sagte, es gäbe dafür keine Ersatzteile mehr also bekam er ihn defekt geschenkt. So fand das Gerät seinen Weg in die warpzone, wo es erst einmal unter die Lupe genommen wurde.
Hardware: Core2Duo CPU, 2GB RAM, ATI/AMD X19xx Grafikkarte, 22″ Bildschirm, abnehmbare Bluetooth-Tastatur mit Touchpad und ein mechanisch interessantes, aufklappendes optische Slot-in Laufwerk.
vorläufige Diagnose: Grafikkarte defekt und keine Festplatte eingebaut.
da1l6 konnte die Grafikkarte nach der Demontage aller entfernbaren Komponenten bei sich in der Firma in einem Reflow-Ofen (quasi einem Löt-“Backofen”) neu verlöten, was tatsächlich dazu führte, dass sie wieder funktionierte.
 Die ersten Versuche, ihn via USB-Stick und einigen Live-Distributionen aus unserem warPXE Netzwerkbootsystem machten einen vielversprechenden Eindruck, lediglich die Tastatur zeigte sich zickig und versagte öfters nach einigen Minuten ihren Dienst (das Touchpad allerdings funktionierte dann weiter). Da keine 2,5″ HDD rumlag, und solche Netzwerkkarten (gerade die älteren) nicht besonders schnell sind, wollte ich sehen, ob ihn das Gerät mithilfe von iPXE und einem iSCSI Target auf unserem WarpNAS dazu bekommen vollständig ohne installierten Massenspeicher zu starten. Ich wählte Fedora 18 als Betriebssystem aus, da diese in der Vergangenheit mit dem nativen Installer dazu zu bewegen war, auf extravaganten Datenspeichern installiert werden zu können. Dummerweise wurde bei Release 18 gerade der Installer komplett neu gemacht, was an vielen Stellen wohl ziemlich “in die Hose gegangen” zu sein schien. :-( So gibt es keine Möglichkeit mehr, ein “special storage device” hinzuzufügen wie in der Vergangenheit möglich. In der initramdisk waren aber hinweise auf iSCSI und iBFT zu finden, weshalb wir dem folgenden Trick eine Chance geben wollten. Die Bootreihenfolge so einstellen, dass er erst aus dem Netzwerk einen Boot vom iSCSI Volume versucht, und danach von CD/DVD. Das hat den Effekt, dass die Informationen zum Device in der iBFT (iSCSI Boot Firmware Table) gespeichert werden und vom Installer ausgewertet werden können.
Die ersten Versuche, ihn via USB-Stick und einigen Live-Distributionen aus unserem warPXE Netzwerkbootsystem machten einen vielversprechenden Eindruck, lediglich die Tastatur zeigte sich zickig und versagte öfters nach einigen Minuten ihren Dienst (das Touchpad allerdings funktionierte dann weiter). Da keine 2,5″ HDD rumlag, und solche Netzwerkkarten (gerade die älteren) nicht besonders schnell sind, wollte ich sehen, ob ihn das Gerät mithilfe von iPXE und einem iSCSI Target auf unserem WarpNAS dazu bekommen vollständig ohne installierten Massenspeicher zu starten. Ich wählte Fedora 18 als Betriebssystem aus, da diese in der Vergangenheit mit dem nativen Installer dazu zu bewegen war, auf extravaganten Datenspeichern installiert werden zu können. Dummerweise wurde bei Release 18 gerade der Installer komplett neu gemacht, was an vielen Stellen wohl ziemlich “in die Hose gegangen” zu sein schien. :-( So gibt es keine Möglichkeit mehr, ein “special storage device” hinzuzufügen wie in der Vergangenheit möglich. In der initramdisk waren aber hinweise auf iSCSI und iBFT zu finden, weshalb wir dem folgenden Trick eine Chance geben wollten. Die Bootreihenfolge so einstellen, dass er erst aus dem Netzwerk einen Boot vom iSCSI Volume versucht, und danach von CD/DVD. Das hat den Effekt, dass die Informationen zum Device in der iBFT (iSCSI Boot Firmware Table) gespeichert werden und vom Installer ausgewertet werden können.
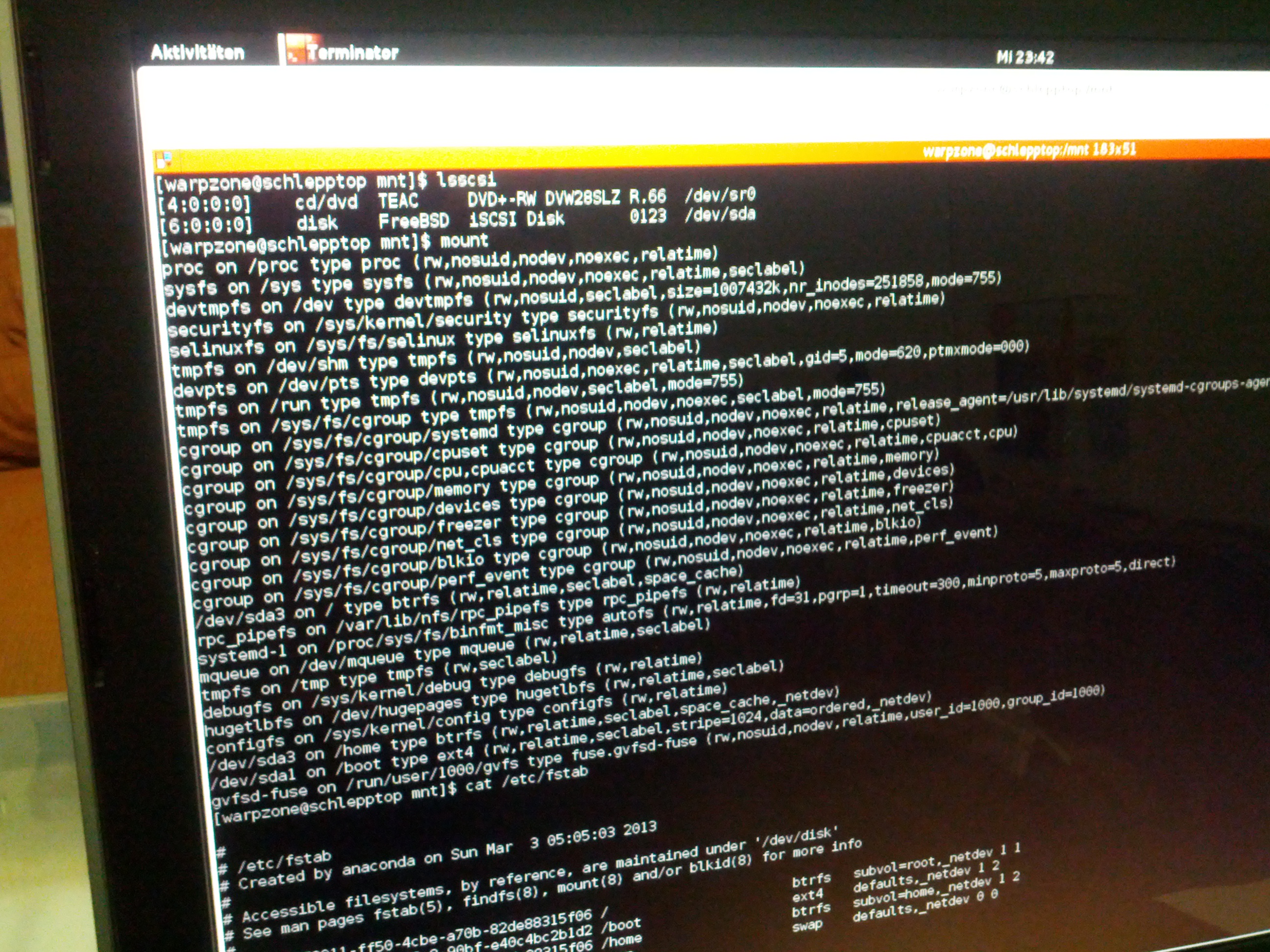
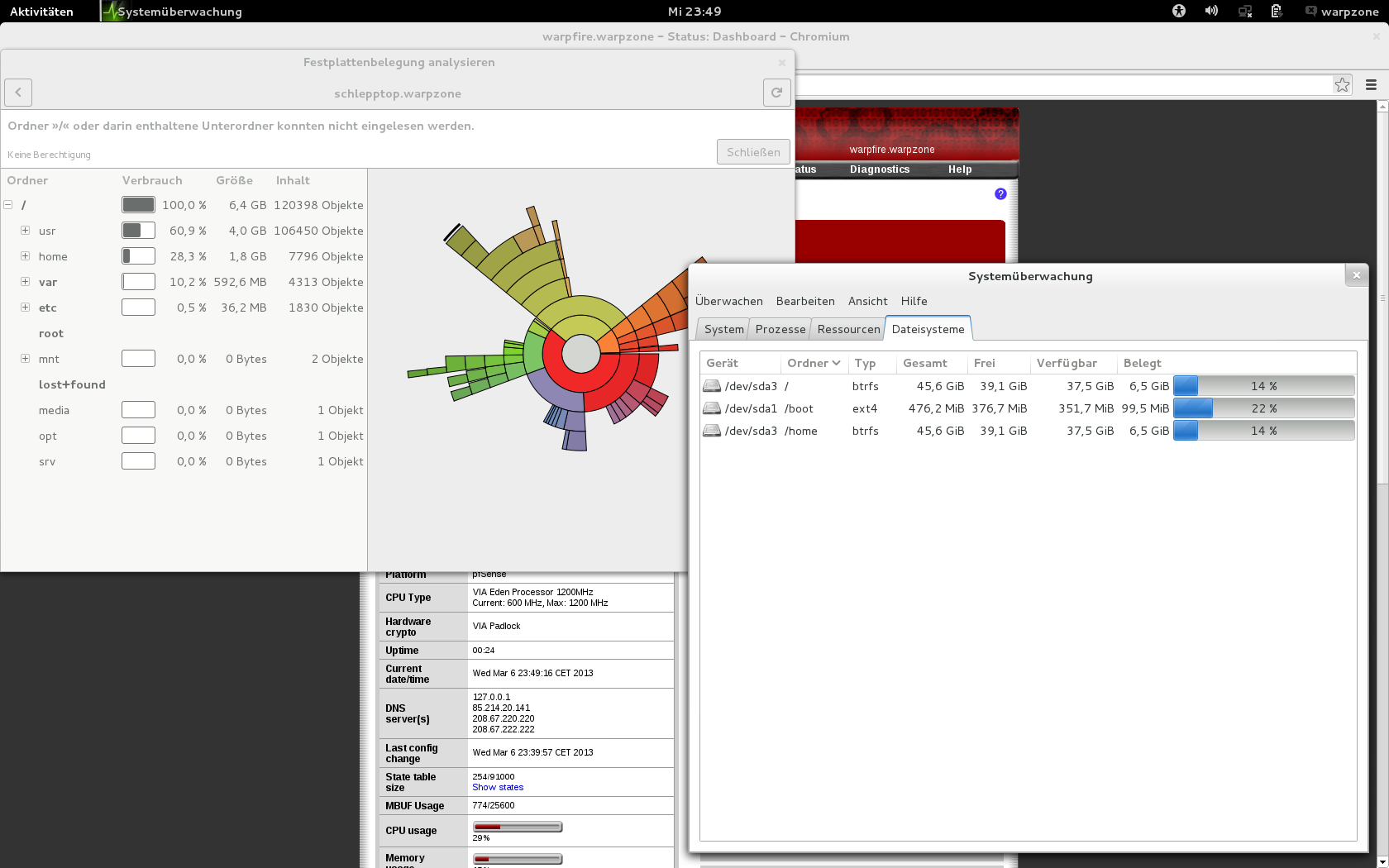
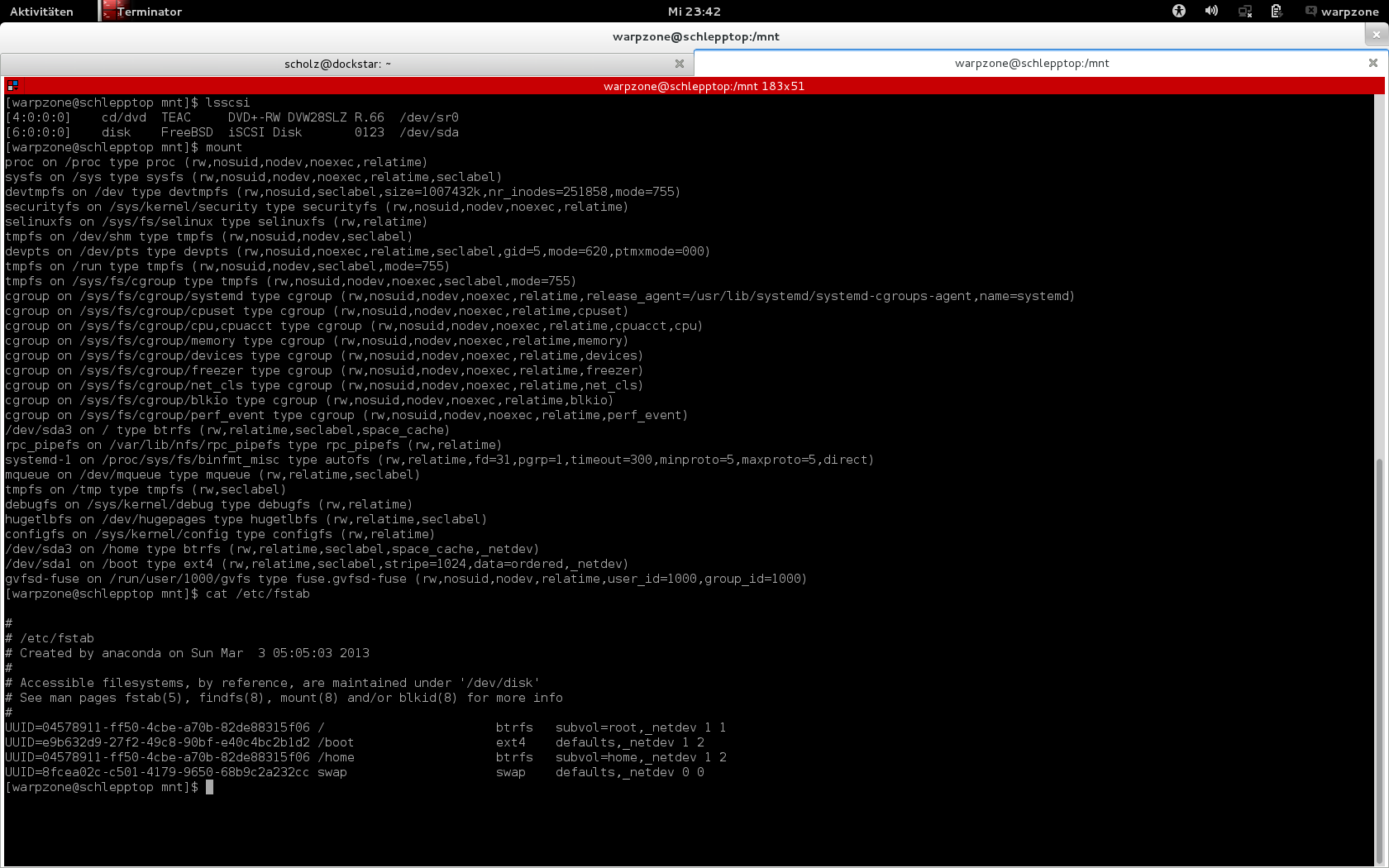
Das hat funktioniert und wir bekamen das “FreeBSD istgt” Volume angezeigt und ich konnte die Installation durchführen. Auch das erste Starten, das einspielen der Systemupdates machte keine Probleme. Erstaunt waren wir ein wenig, wie zügig das System mit der Netzwerkfestplatte reagiert, da Netzwerklatenzen und der theoretische Maximaldurchsatz von etwa Gigabit LAN durchaus langsamer sind als halbwegs aktuelle Festplatten oder gar SSDs. Auch der RAM des FreeNAS Storages ist mit 4GB nicht gerade üppig, anscheinend aber vollkommen ausreichend ;-)
Dieser Rechner kann nun platzsparend zusammengeklappt in der Lounge stehen, und dort wo er benötigt wird aufgebaut werden. Lediglich Netzwerkkabel reinstecken und einschalten (ja er läuft auch ohne Stromkabel auf Akku).